



U sigurnosnim scenarijima, nadzorna oprema često je izložena oscilacijama vjetra - zbog ugradnje duge - na daljinu. Dok je kamera Široki - Način kuta pokazuje minimalnu osjetljivost na vanjske poremećaje, telefoto Optički pojačava mehaničke vibracije, što dovodi do značajnog zamućivanja slike ili čak gubitka ciljnog fokusa. Posljedično, aktivni mehanizmi stabilizacije postali su kritični tehnički zahtjev za sustave nadzora dugih - Trenutne tehnologije stabilizacije prvenstveno spadaju u dvije kategorije: Stabilizacija optičke slike (OIS) i Elektronička stabilizacija slike (EIS).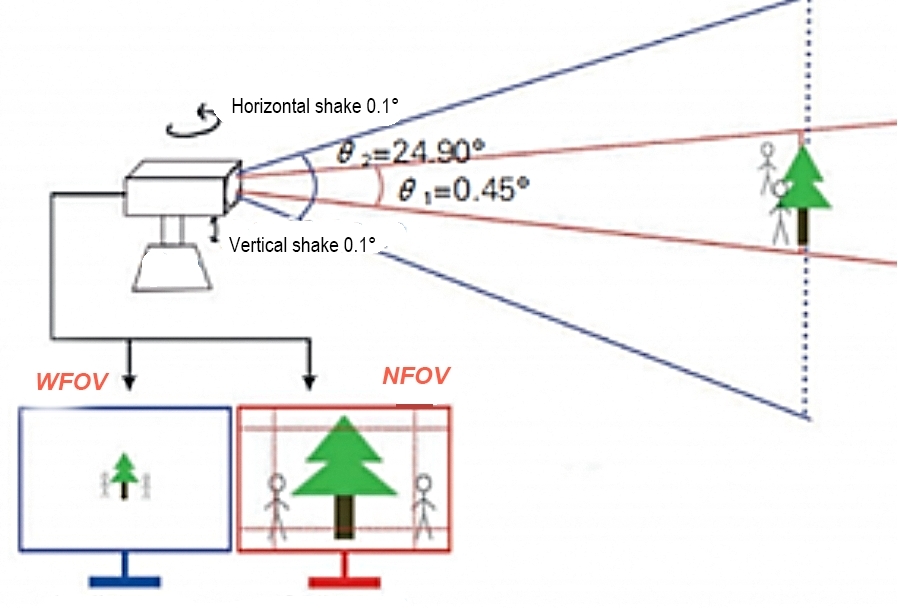
EIS koristi algoritam za obradu slike za postizanje stabilizacije slike. Zahtijeva da se trenutni hitac poveća, što rezultira 10% - 20% gubitka vidnog polja za nadzor. U EIS tehnologiji leća je odgovorna samo za stjecanje slike. Nakon što senzor formira sliku, prvo se mora stabilizirati slika pomoću ugrađenog - u algoritmu jezgre procesora slike, a zatim se video komprimira i prenosi. Ova vrsta stabilizacije slike u potpunosti se postiže tehnologijom digitalne obrade, što smanjuje kvalitetu videozapisa i ima opći efekt stabilizacije. Obično se koristi u niskim - krajnjim proizvodima zbog svoje troškovne prednosti.

OIS koristi ugrađenu - u žiroskopu unutar sklopa leće za otkrivanje vibracija kamere. Gyroskop pretvara podatke o mehaničkim kretanjem u električne signale koji se prenose na OIS regulator. Centralna obrađivačka jedinica kontrolera odmah analizira i izračunava pomak ili kut koji leća treba nadoknaditi i koristi elektromagnetsku silu koju generiraju tri seta zavojnica i magneta kroz pogonski motor kako bi precizno vozio leću na nagib, ispravio optičku patu i izbjegao zamah slike. U optičkom dizajnu, dodavanjem pokretne leće, pomak leće se kontrolira na temelju količine shake, kompenzirajući optički put natrag u stabilno stanje.
Unutar svakog ciklusa izloženosti OIS se mora uzastopno izvršiti: otkrivanje vibracija, obrada signala i kompenzacijsko aktiviranje leća. Cijeli postupak je servo kretanje, koje također ima karakteristike kratkog vremena otkrivanja, brzine obrade brzine, pomaka kompenzacije malog leće i prihvaća jednostavan i relativno stabilan algoritam kontrole PID -a.